コンピュータビジョンの基礎_カメラモデルと座標系
カメラモデル
コンピュータビジョンにおいて、カメラは現実世界をデジタル画像として捉えるための重要なツールです。カメラの動作を理解し、3次元空間内の物体を2次元画像に投影するプロセスを数学的に記述するために、カメラモデルが使用されます。
ピンホールカメラモデル
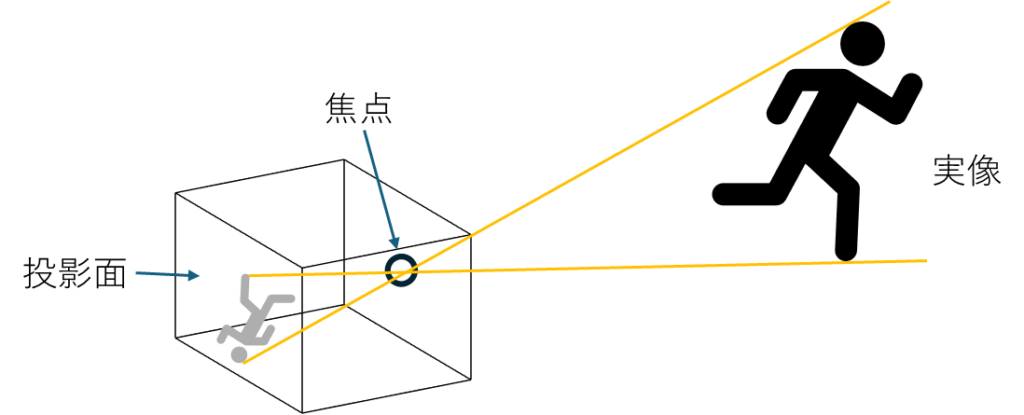
最も基本的なカメラモデルは、ピンホールカメラモデルです。
ピンホールカメラでは、レンズの代わりに小さな穴(ピンホール)を通して光がカメラ内に入り、反対側の面に像が投影されると考えます。ピンホールを通る光は直線であるため、投影される像はピンホールと物体の位置関係によって決まります。
このモデルでは、ピンホールを通った光がカメラの焦点距離だけ先にある投影面 (plane of projection) に結像する様子を幾何学的に抽象化しています。
透視投影モデル
ピンホールカメラモデルでは対象の像が上下左右に反転してしまうので、コンピュータビジョン分野では透視投影モデル (perspective projection model) を利用します。
これは光学中心から透明な仮想投影面を通して3次元空間を見ることで、対象の像と投影面における対象の向きが一致するようになります。

また、透視投影変換を使うことでワールド座標→カメラ座標→画像座標の変換が可能になります。
コンピュータビジョンの座標系
コンピュータビジョンの分野で使われる座標系は主に4つに分けられます。
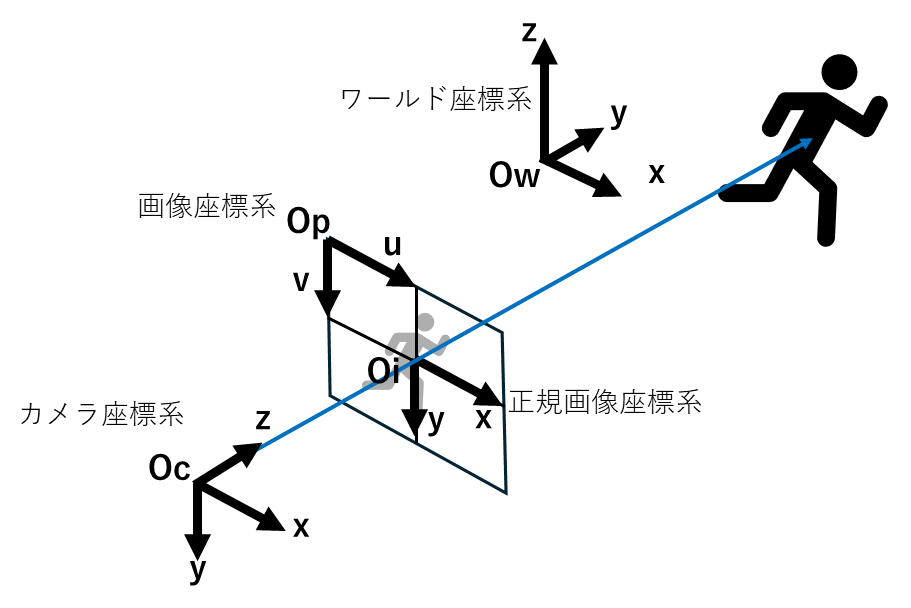
・ワールド座標系(Ow)
基準となる座標系
・カメラ座標系(Oc)
実際の空間に存在するカメラの光学中心を原点として、z軸をカメラの光軸方向に一致させ、z軸に垂直な面における右方向をx軸、下方向をy軸とした座標系
・画像座標系 (Op)
画像の左上端を原点としピクセル単位の座標系
・正規化画像座標系 (Oi)
光学中心から撮像面に下した垂線と撮像面との交点を原点にし、焦点距離を1としたピクセル単位の座標系
これらの座標系はカメラの内部パラメータと外部パラメータを使用して相互に変換が可能です。
カメラパラメータについては次の記事で解説します。