【3D点群処理】点群データにおける法線とOpen3Dを用いた法線の推定

点群における法線とは
点群データにおける法線は、各点が存在する3次元空間における「面」の向きを示します。
具体的には、ある点を中心とした近傍の点群が形成する面に対して垂直な方向を指しま ...
【Python】Numpyのチートシート
Numpyのインポートimport numpy as np配列の作成# 1次元配列a = np.array()# 2次元配列b = np.array(, ])# 0から9までの配列c = np.ara ...
【最新書籍】データアナリストになるための必須スキルと学習方法

データアナリストとは
データアナリストは、ビジネス上の問題を解決するために、データを解析して有用な情報を引き出す専門家です。
企業がデータドリブンな意思決定を行うための重要な役割を果た ...
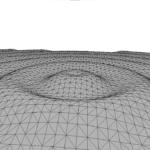
【Python_点群処理】点群データをメッシュに変換してプロットする方法
はじめに
今回は点群からメッシュを作成して可視化してみます。
メッシュの作成方法はいくつかありますが、今回は点群からドロネー三角形を計算してメッシュを生成します。
ドロネー ...
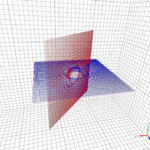
【Python_点群処理】回転行列を使った3次元点群の回転
回転
3次元点群を回転行列を使用して回転させてみます。
回転行列は3×3行列で表現され、x軸、y軸、z軸周りの回転は以下のようにあらわすことができます。
x軸まわりの回転
【Python点群処理】3次元点群の正規化
正規化
3次元点群データの正規化をしてみます。
ディープラーニングを用いた推論や前処理時に使用します。
今回は、データの平均値からの偏差をデータ範囲(=最大値-最小値)で割 ...
【Python】Numpyでsinc関数の点群データを生成
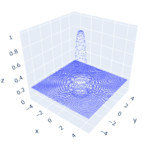
PythonのNumpyで平面の点群データを生成します。
今回は、1辺の長さが5mでsinc関数の点群を生成してみます。
import numpy as np import r ...【3D点群処理】Numpy平面の点群データを生成
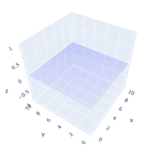
PythonのNumpyで平面の点群データを生成します。
今回は、1辺の長さが10mの平面の点群を生成してみます。
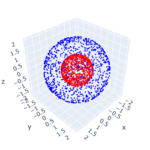
import numpy as np import rand ...【3D点群処理】Numpyで球の点群データを生成
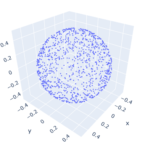
PythonのNumpyで球形の点群データを生成します。
今回は、半径r=0.5、1000点からなる球の形をした点群を生成してみます。
import numpy as np i ...【3D点群処理】Pythonで点群を3次元プロットして可視化する方法4選
はじめに
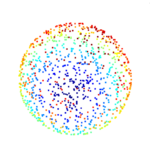
Pythonで3次元点群を表示する方法をいくつか紹介します。
今回使用するデータは、1000点からなる球の形をした点群です。
numpy配列でサイズ (1000,3) ...