【3D点群処理】ノイズ除去_Static based outlier filter
はじめに
3D点群データのノイズ除去についてみていきます。今回はStatic based outlier filterというアルゴリズムについて解説します。
Static based outlier filterはOpen3Dにも実装されています。
Open3d-Static based outlier removal
Static based outlier filter
Static based outlier filterは、K近傍点との平均距離を各点で算出し、算出した距離を使って統計的に外れ値を取り除く手法です。
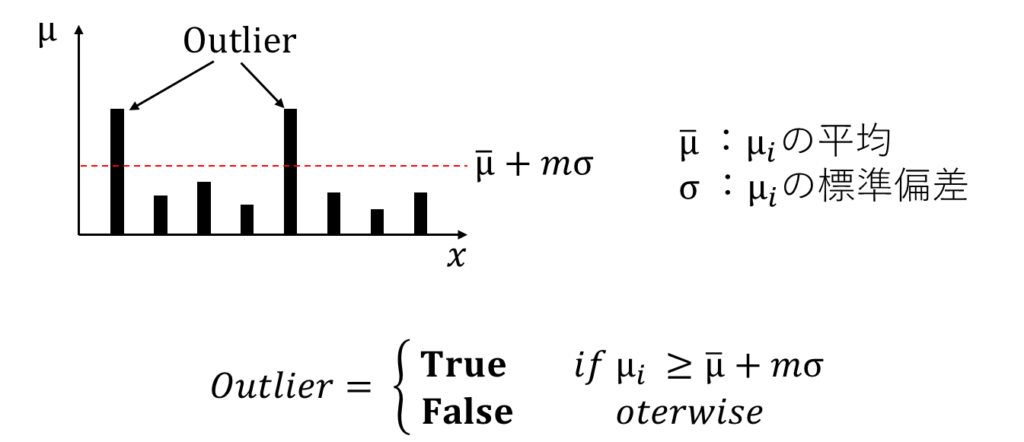
注目点xiと近傍点(k個)の距離dを計算し、平均μを求めます。

すべての点xで上記の平均μを求めます。その後、各点における平均μから全体の平均と標準偏差を求めます。
注目点から近傍点までの平均距離μが平均+(定数×標準偏差)以上の場合に外れ値とします。
Open3Dでの実装
Open3Dを使うと下記のコードで実装できます。
nb_neighbor:近傍点の個数
std_ratio:標準偏差にかける定数
print("Statistical oulier removal")
cl, ind = voxel_down_pcd.remove_statistical_outlier(nb_neighbors=20,
std_ratio=2.0)
display_inlier_outlier(voxel_down_pcd, ind)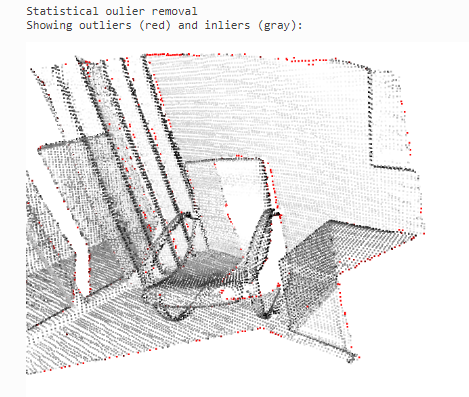
おすすめ参考書
リンク
リンク