【環境構築なしで今すぐ試せる最新技術】Huggingfaceとは?
Hugging Faceとは?
Hugging Faceは、機械学習の研究者や開発者が容易にアクセスできる高品質な自然言語処理ツールを提供することを目指しています。
同社の提供するTr ...
Dockerコンテナをアイコン付きでそのままexe化する方法
やりたいこと
Ubuntu上でDockerコンテナを立てて開発したPythonコードを、Windowsアプリとしてアイコン付きでexe化したい!
サマリーwindowsでPyinst ...【論文】PointLLM: 大規模言語モデルによる3D点群の理解

この論文は「PointLLM: Empowering Large Language Models to Understand Point Clouds」というタイトルで、大規模な言語モデル(LL ...
【書籍】3Dデータ/点群処理について入門から応用までの勉強方法

はじめに
3Dデータがどのように使われているか、3次元点群処理について学びたい方向けのおすすめ書籍を紹介します。
入門編では、3Dデータはどのようなところで活用されているかなど、3Dデ ...
【3D点群処理】点群データにおける法線とOpen3Dを用いた法線の推定

点群における法線とは
点群データにおける法線は、各点が存在する3次元空間における「面」の向きを示します。
具体的には、ある点を中心とした近傍の点群が形成する面に対して垂直な方向を指しま ...
SQLのチートシート②
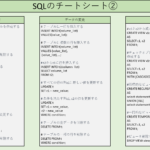
テーブルの操作#三つの列を持つ新しいテーブルを作成するCREATE TABLE t ( id INT PRIMARY KEY, name VARCHAR NOT NULL, price INT DEF ...
SQLのチートシート①
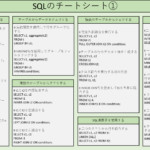
テーブルからデータをクエリする# テーブルからc1, c2の列のデータをクエリするSELECT c1, c2 FROM t;# テーブルからすべての行と列のデータをクエリするSELECT * FROM ...
Dockerのチートシート
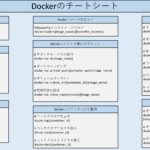
インストール# Ubuntuの場合sudo apt-get updatesudo apt-get install docker-ceイメージの操作# イメージの取得docker pull # イメージ ...
【Python】Numpyのチートシート
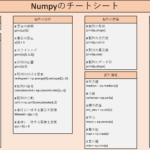
Numpyのインポートimport numpy as np配列の作成# 1次元配列a = np.array()# 2次元配列b = np.array(, ])# 0から9までの配列c = np.ara ...
【論文】Point2Vec for Self-Supervised Representation Learning on Point Clouds
※ただの翻訳とポイントを書いたメモです。正確性は保証していません。
アブスト近年自己教師付き学習フレームワークであるdata2vecは、マスクされた学生-教師アプローチを使用して様々 ...